EtherCAT Master Controller Solution Based on MYIR's Allwinner T507-H SOM

2023-02-18

4272
EtherCAT is a real-time industrial Ethernet technology proposed by the German BECKHOFF company in 2003. It has the characteristics of high speed and high data efficiency, and supports multiple device connection topologies. Its slave nodes use dedicated control chips, while the master station uses standard Ethernet controllers.
EtherCAT is an industrial Ethernet technology that is mostly used in servo motors. Because it is based on Ethernet technology, EtherCAT is much faster in speed compared to CAN bus. EtherCAT can reach a speed of 100M, while CAN only has 1M. In addition, EtherCAT also features low latency and precise synchronization.

Both Industry 4.0 and the Internet of Things require highly networked and powerful communication capabilities between devices and servers. EtherCAT is a mature industrial Ethernet fieldbus specifically designed for the field of motion control. Compared to traditional industrial fieldbuses, EtherCAT has many advantages such as high stability, high real-time performance, high integration, strong scalability, and easy installation. It breaks through the system limitations of traditional Ethernet solutions and is widely used in the field of industrial control.
EtherCAT control systems generally consist of HMI/WEB interface systems, master station controllers, several slave station controllers, and servo motors. The HMI/WEB interface system is used to send control commands and display human-machine interfaces; EtherCAT master station is generally implemented through embedded hardware, real-time patching of Linux system, and EtherCAT master station software, and communication of EtherCAT master station is achieved through Ethernet card. EtherCAT communication is used between the master controller and the slave controller to achieve real-time control and data transmission of the closed-loop servo system.
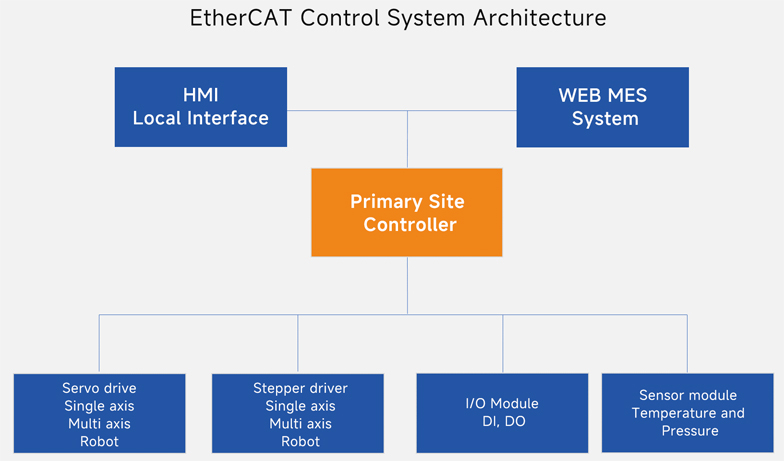
EtherCAT Control System Architecture
Based on MYC-YT507H SOM, the main station controller can achieve more intelligent EtherCAT main station control by applying Preempt-RT real-time patches to the kernel and porting the open-source EtherCAT main station software IGH.
Communicate data through T507-H's native Gigabit Ethernet interface and WEB MES system; Native 100Mbps dedicated EtherCAT interface and slave servo drive communicate with EtherCAT to control servo motors in real-time; RS485 interface is used to connect serial sensing devices for the collection of temperature, pressure, and other data; Connect the input and output of digital signals through DI/DO interfaces; Because T057-H does not natively support CAN functionality, it is converted from SPI to CAN for connecting CAN bus devices; Additionally, an HDMI interface is provided for communication with human-machine interfaces or displays.
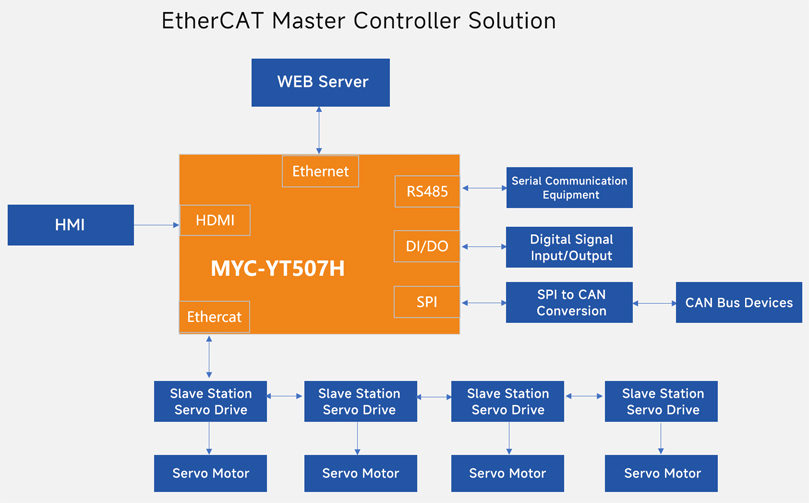
Main Station Controller Based on MYC-YT507H SOM
The MYC-YT507H SOM, adopting the Allwinner processor T507-H, has reliable quality, ultra-high performance, abundant peripheral resources, low cost, and long-term availability, suitable for the CPU module of high-performance intelligent devices.

Super computing performance: quad core Cortex- A53 CPU, 1.5GHz main frequency, equipped with G31 GPU, supports 4K@60FPS H. 265 video decoding, supported 4K@25FPS H. 264 video encoding;
Rich multimedia support: Supports four display output interfaces: LVDS, HDMI, RGB, and CVBS, and can support dual screen same display and dual screen different display, meeting the needs of multi screen application scenarios; Support MIPI CSI and DVP camera input;
Rich peripheral expansion: Supports dual network ports, 4 USB 2.0 interfaces, 1 SPI, 5 UART, 2 SDIO.
Reliable Quality: Onboard Full Star T507-H processor, PMIC power management chip, LPDDR4, eMMC, SOM PCB size 43mmx45mm, using SMD packaging, through 10 layer PCB gold plating process, sturdy and reliable.
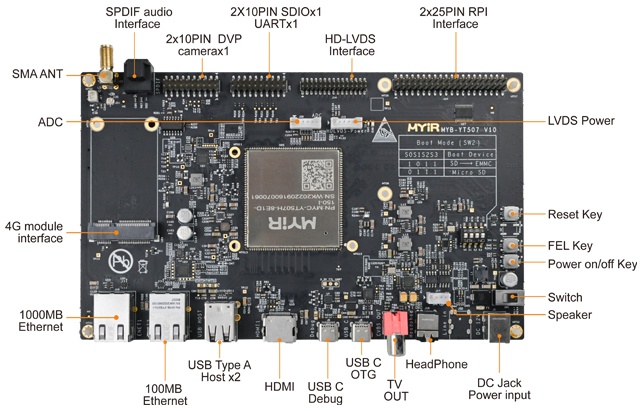
Top-view of MYD-YT507H Development Board
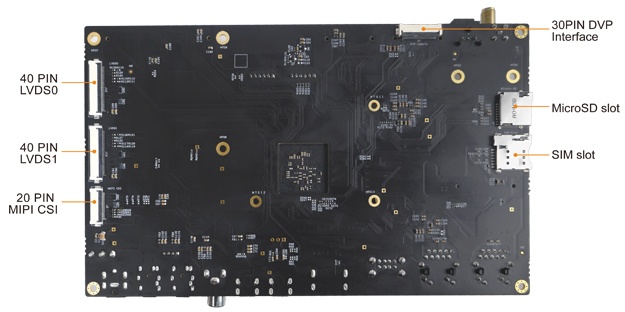
Bottom-view of MYD-YT507H Development Board

2024-10-12
Application of MYIR's i.MX 6ULL SOM in Teaching Devices
With the development of robotics technology, the application of robots in social production has been promoted. However, the application of robots face some issues such as difficulties in development a
2024-09-25
Application of MYC-Y6ULX-V2 System-On-Module in Motion Control System
With the continuous trend of automation from semi-automatic to fully automatic, the whole industry’s requirements for the "brain" of automation - control system are increasingly high, not on
2024-06-25
EtherCAT Master Controller Solution Based on Remi Pi
EtherCAT is a real-time industrial Ethernet technology proposed by the German BECKHOFF company in 2003. It has the characteristics of high speed and high data efficiency, and supports multiple device
2023-04-13
Industrial Data Acquisition Applications Utilizing MYIR's MYC-JX8MMA7 ARM+FPGA SOM
With the development of communication and network technology and the Internet, the digitization, networking, and intelligence of industrial management have become an inevitable trend. The use of indus
2023-03-21
Application of MYC-Y6ULX-V2 System-On-Module in Mechanical Intelligent Controllers
In recent years, with the development of information technology, the requirements for industrial intelligence and intelligent construction machinery have also been increasing, leading to a growing dem