Simultaneous Control of 4 YOLOv8 Video Streams via MYIR's RK3576 Board

2025-11-02

1367
In the era of rapid technological advancement, the integration of artificial intelligence and edge computing is transforming our lives at an unprecedented pace. The RK3576 processor features a quad-core Cortex-A72 and a quad-core Cortex-A53 for foundational computing power, coupled with a 6TOPS NPU for model inference tasks. Utilizing the YOLOv8 model is also straightforward, so let's examine its capabilities using MYIR's MYD-LR3576 RK3576 Development Board.

About YOLO
YOLO (You Only Look Once) is a leading real-time object detection algorithm series in the industry, known for its perfect balance of speed and accuracy. Since its release, it has undergone several version changes, and the following figure illustrates its development history.
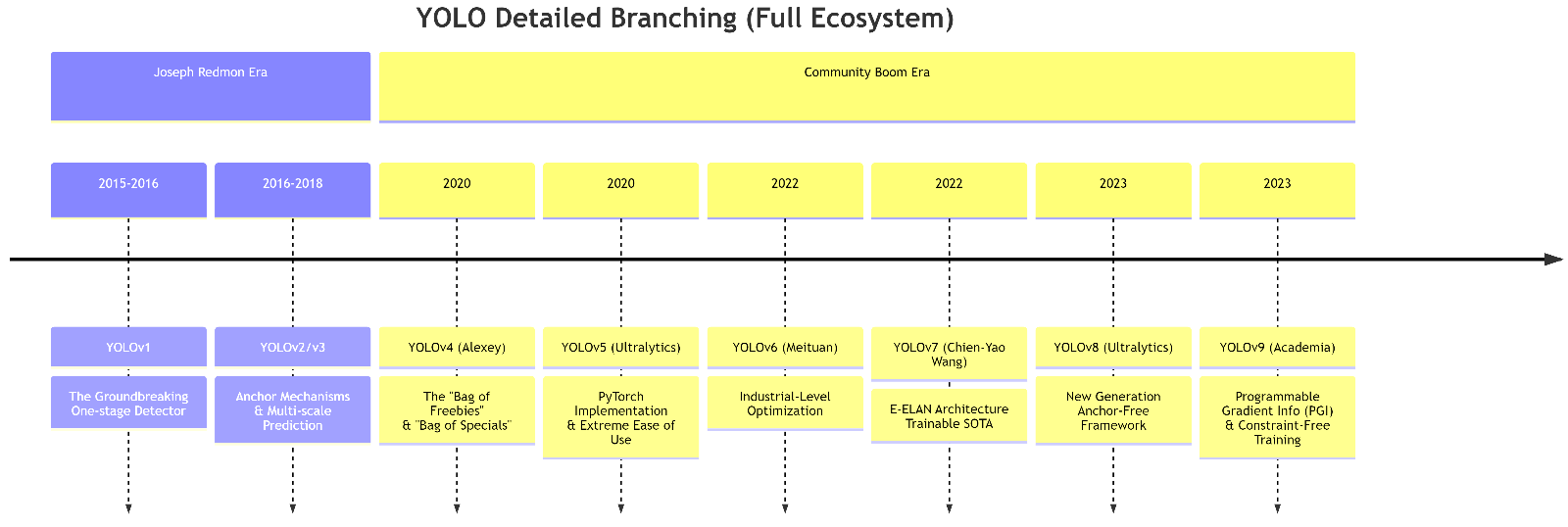
Evolution of YOLO Versions
YOLOv8 achieves an optimal balance by seamlessly integrating high performance, user-friendly design, cutting-edge architectural modernity, and a robust ecosystem. This makes it the most comprehensive and hassle-free choice available in the current market, offering unparalleled ease and efficiency for users seeking advanced object detection capabilities.
YOLOv8 has numerous suffixes, which are simply listed in a table to indicate their respective meanings:
Table 1-1 By task type
suffix | full name | assignment | output | Typical Application |
-det | Detection | object detection | BBox + category and confidence | Find all objects of interest in the image and box them. For example: pedestrian detection, vehicle detection, helmet detection. |
-seg | Segmentation | instance segmentation | Bbox + Category + Pixel-level Mask | Based on object detection, it further delineates the precise contours of objects. For example, it can be used for object cutting or road and vehicle shape recognition in autonomous driving. |
-pose | Pose | Key Point Detection | Bbox + 17 key | Detect key skeletal points of the human body. For example: motion recognition, |
-cls | Classification | image classification | Category label for the entire image | Determine which category an image belongs to. For example: cat and dog classification, image quality assessment. |
-obb | Oriented BoundingBoxes | Rotate object detection | Rotate bounding box (BBox + angle θ) + category and confidence | Detecting objects with angles where the bounding box is not horizontal. |
Table 1-2 By model size
prefix | meaning | characteristic | applicable scene |
n | Nano | The smallest model has the fastest speed and the lowest accuracy | Mobile devices, embedded systems (e.g., Jetson Nano), and real-time CPU inference |
s | Small | Small model, speed and accuracy balance | The most commonly used starting point, suitable for most scenarios requiring real-time performance (such as video stream analysis) |
m | Medium | Medium model, best balance between accuracy and speed | High accuracy is required, and the speed is still good |
l | Large | Large model, high accuracy, slow speed | Server-side applications where accuracy is more important than speed |
x | X-Large | Super large model, highest accuracy, slowest speed | Academic research, ranking, and offline analysis with extreme accuracy requirements |
MYIR Demo Model Selection
For MYD-LR3576, the s/n small model with fewer parameters is more suitable. We demonstrate this by using basic functions and the -seg, -obb, and -pos parameters.
Test video scenes separately. The implementation is as follows:
The MYD-LR3576 features three MIPI-CSI interfaces, with three MY-CAM004M MIPI Camera modules connecting to each channel. It supports four AHD HD cameras using a 2+1+1 configuration, outputting H.264-encoded RTSP streams at 1920×1080 resolution and 30 fps. After processing by the MYD-LR3576 development board, each channel delivers 1920×1080 video at 25 fps, while the combined output of four channels reaches 60-70 fps. The CPU utilization approaches 100%, with the NPU achieving a 50-60% utilization rate.
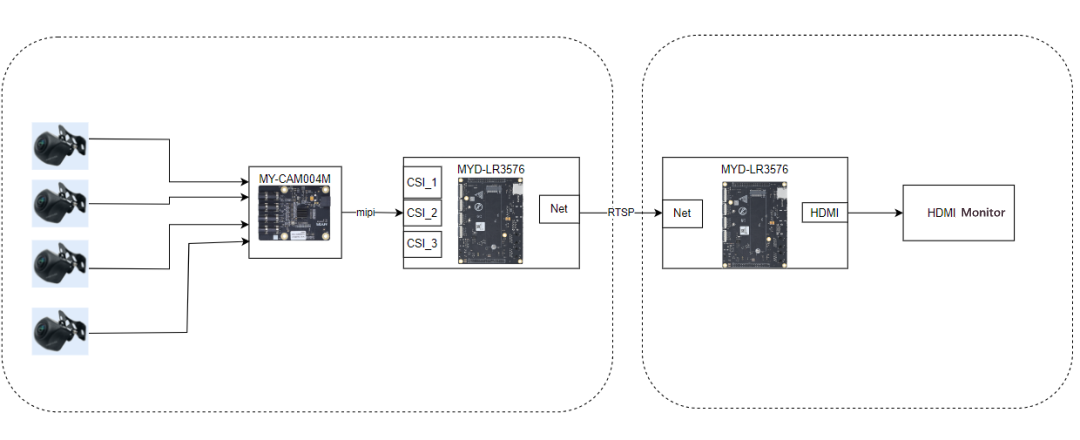
Connections
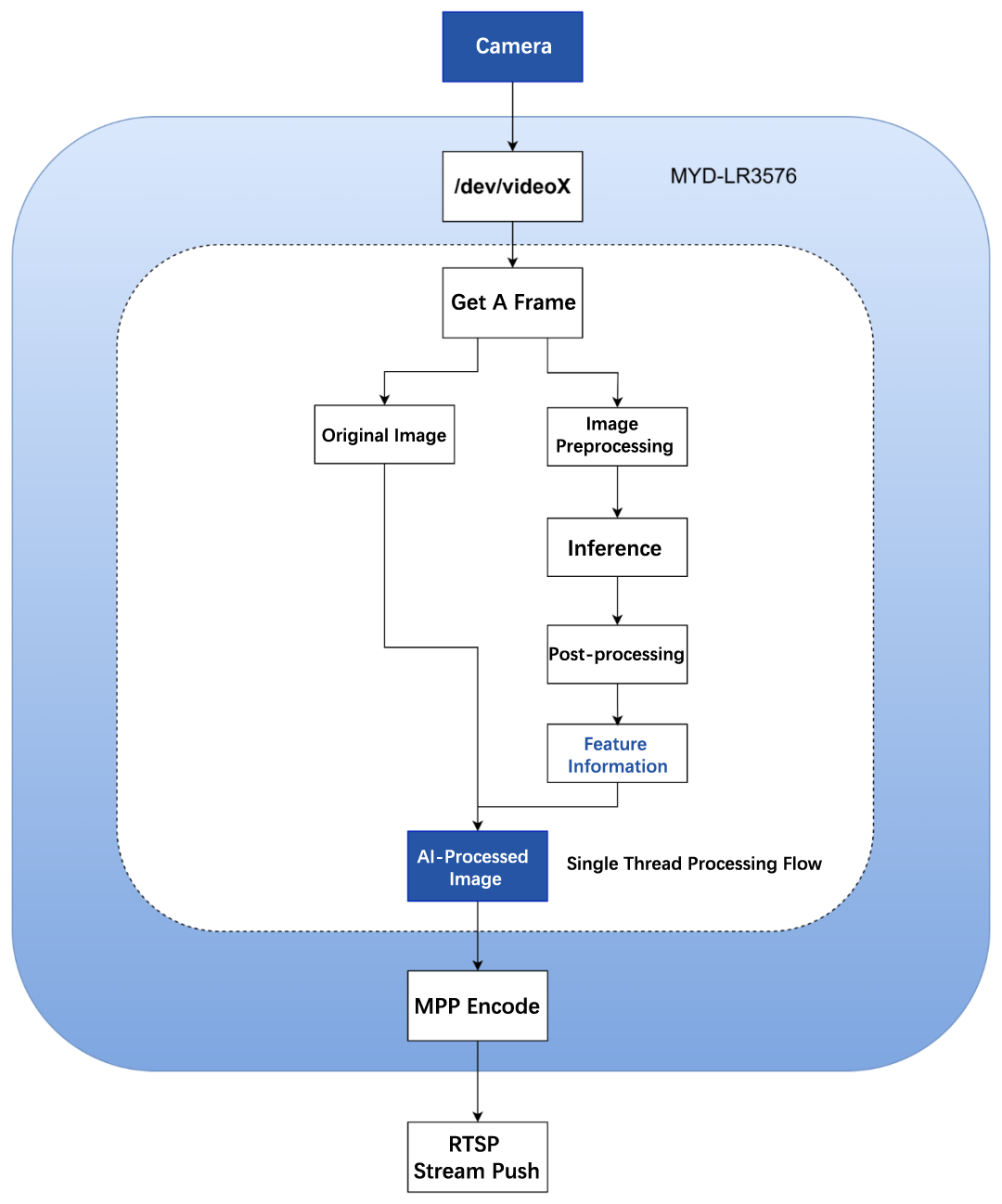
Camera data processing flowchart
What optimizations does MYIR implement in the program?
AI inference round
Get CSI frame data
Crop data to a smaller image of xxx*yyy
Process using RKNN API
Get feature location and similarity
Enlarge to original image
Add boxes and similarity values to the original image
This results in low CPU utilization, reduced video capture frame rates, and ultimately a lagging display.
MYIR utilizes a thread pool architecture to process the aforementioned operations via threads, fully exploiting the capabilities of 4x A72 and 4x A53 cores while employing the RGA for image cropping and scaling. The system harmonizes the CPU, GPU, NPU, and VPU modules to optimize resource utilization.
The RK3576 demonstrates exceptional performance in the YOLOv8 model, with applications spanning multiple domains. For instance, in smart security systems deployed at public venues like airports, train stations, and shopping malls, it swiftly identifies abnormal behaviors such as fights or fleeing individuals, triggering instant alerts. Through facial recognition technology, the system verifies identities of visitors against its database, enabling real-time monitoring and tracking of key personnel. Additionally, it can provide rapid feedback when integrated with intelligent robots.
Stay tuned for more innovative applications of MYD-LR3576.



2026-05-19
When 6 TOPS Is No Longer the Limit: RK3576 + Hailo-8 Achieves True Real-Time Processing for High-Frame-Rate Cameras
Beyond 6 TOPS: RK3576 + Hailo-8 Delivers True Real-Time for High-FPS Cameras
2025-11-27
SECC GreenPHY Solution: Bridging STM32MP135 SOM to V2G Industry Advancement
Debug MSE102x G on MYC-YF13X, providing reference for V2G communication development.
2025-11-20
SECC Solution for Charging Pile Applications
MYIR's SECC solution delivers a high-standard, low-risk rapid development platform for clients, with core strengths in protocol compatibility, operational security, and a comprehensive reference design.
2025-09-20
Compiling OpenCV and Developing Applications on the RK3576 Board
This article introduces how to compile OpenCV on the RK3576 development board and build an application.
2025-08-30
MYIR T536 Development Board: Multi-protocol IoT Gateway Solution Test
The article details the development and testing of a multi-protocol IoT gateway solution that utilizes MYIR's MYD-LT536 development board, which is based on the Allwinner T536 SoC.
2025-08-29
MYIR RK3576 Development Board: 12-Channel 1080p HD Video Streaming
MYIR has successfully achieved efficient H.264 encoding and low-latency RTSP streaming for 12-channel HD video streams on the Rockchip RK3576 SOM.
2025-08-07
Compiling Kernel for MYD-LMX9X Development Board
This guide walks you through building a Linux kernel for the MYIR MYD-LMX9X Development Board
2025-06-23
RZ/G2L-Based MYD-YG2LX System Startup Time Optimization Application Notes
This article introduces a debugging case for optimizing system boot time based on the MYD-YG2LX development board.
2025-06-23
How to Implement an Environmental Monitoring System on the STM32MP257 Board
This article introduces how to use MYIR's MYD-LD25X development board (MYIR's STM35MP257-based development board) to implement a simple environmental monitoring system.